Приводы главного движения различают по виду приводного двигателя, способу переключения частот вращения и компоновке. Совершенствование двигателей постоянного и переменного тока с частным регулированием и систем их регулирования позволит полностью отказаться от механических коробок скоростей, выполнять шпиндельную бабку в виде отдельного унифицированного узла. Созданы электромеханические приводы главного движения в виде модуля с планетарным редуктором на две ступени (рис. 1). Другой особенностью электроприводов главного движения является дальнейшее развитие безредукторных электромеханических шпиндельных узлов, в которых ротор электродвигателя насаживают непосредственно на шпиндель станка.
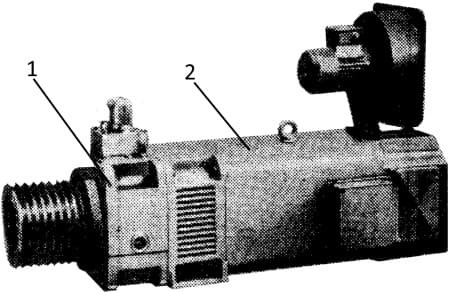
Рис. 1. Электромеханический привод главного движения: 1 - планетарный редуктор; 2 - регулируемый двигатель постоянного тока
Способ переключения передач определяется назначением станка и в основном зависит от частоты переключения, необходимости его автоматизации и дистанционного управления приводом.
Системы ручного переключения пока еще применяют в универсальных станках общего назначения; основные их достоинства - простота и низкая стоимость. Как правило, применяют однорукояточные селективные (избирательные) системы управления, что способствует удобству управления и снижает время на переключение. При этом нет необходимости проходить через ненужные промежуточные положения зубчатых блоков. Конструкция селективной системы управления фрезерного станка представлена в другой статье (см. рис. 11, Привод главного движения станка). В универсальных станках применяют и электрогидравлические механизмы преселективного управления. Под преселективным управлением понимают такое управление, при котором необходимые режимы обработки на следующую операцию можно установить во время работы станка на предыдущей, что сокращает вспомогательное время, связанное с управлением станком.
В автоматических станках переключение скоростей часто осуществляется с помощью электромагнитных фрикционных или зубчатых муфт. Применение электромагнитных фрикционных муфт позволяет переключать скорости в процессе работы станка, однако уменьшает КПД станка, так как все зубчатые передачи находятся в зацеплении и существует повышенное трение в дисках.
Автоматические коробки скоростей с электомуфтами (АКС) выпускаются централизованно с 9, 12 и 18 ступенями семи габаритов, рассчитанные на мощности от 1,5 до 55 кВт. Так как электромагнитные муфты нежелательно встраивать в шпиндельные бабки станков, то в станках с числовым управлением в приводах с двигателями постоянного тока применяют зубчатые передачи, переключаемые автоматически с помощью индивидуальных электромеханических (реже гидравлических) приводов. Схемы таких приводов даны на рис. 2. В автоматических станках с большим числом механических передач возможны системы управления, выполненные на базе соответствующих селективных или преселективных систем.
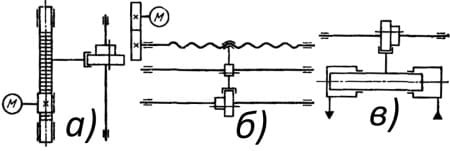
Рис. 2. Схемы механизмов переключения передач в станках с ЧПУ: а - с реечной передачей; б - с передачей винт-гайка; в - с гидроцилиндром
Компоновку приводов главного движения определяют общие компоновки металлообрабатывающих станков, связанных с их служебным назначением и типоразмерами, а также связями между отдельными элементами привода: двигателем, коробкой скоростей и шпиндельной бабкой. При раздельном приводе механическая часть состоит из двух узлов: коробки скоростей (редуктора) и шпиндельной бабки, соединяемых ременной передачей. Иногда в шпиндельную бабку помещают переборную группу. По такому типу конструируют приводы станков с числовым управлением с обычными асинхронными двигателями и АКС. Для удобства надевания ремней применяют консольное расположение шкива на конце шпинделя. Для создания более компактного привода применяют компоновки, в которых механическую часть встраивают непосредственно в шпиндельную бабку. Следует учитывать, что в этом случае вибрации, возникающие в коробке скоростей, а также выделяющаяся в ней теплота влияют на положение шпинделя и на точность его вращения.
В соответствии с общей тенденцией по автоматизации проектно-конструкторских работ в станкостроении разработана и действует автоматизированная подсистема «Главный привод» (рис. 3), входящая в общую САПР. Подсистема предназначена для синтеза кинематической структуры, проектных и проверочных расчетов элементов привода главного движения с электродвигателями переменного и постоянного тока и механической коробкой скоростей. Подсистема создана для работы в режиме диалога между конструктором и главным компьютером, когда выбор всех принципиальных решений и оценку результатов каждого этапа проектирования осуществляет конструктор, который также выделяет задания на проведение последующих этапов проектирования или на повторение предыдущих. При наличии в системе соответствующего оборудования можно получить графическое изображение структурной сетки, эскизы развертки и свертки коробки скоростей.
В подсистеме имеется также автоматический справочник, позволяющий накапливать и выдавать по запросу различную техническую информацию (типовые структуры, характеристики комплектующих изделий, необходимые для расчетов).
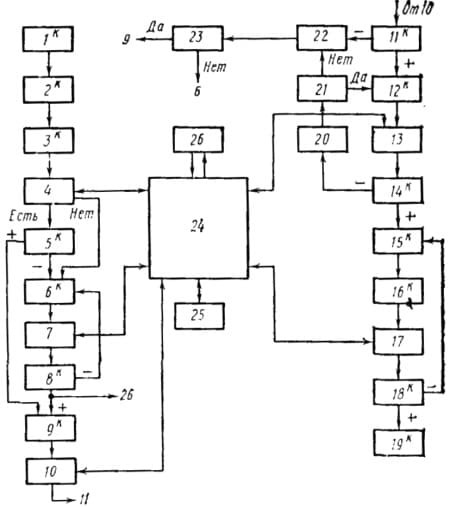
Рис. 3. Структурная схема подсистемы «Главный привод»: 1 - техническое задание на проектирование привода; 2 - анализ технического задания, выбор типа привода; 3 - заполнение бланка на поиск типовой кинематической структуры; 4 - поиск типовых решений; 5 - анализ типовых решений; 6 - заполнение бланка на синтез кинематической структуры; 7 - синтез структуры; 8 - анализ полученных вариантов; 9 - подготовка данных для эскизного проектирования; 10 - эскизное проектирование привода; 11 - оценка вариантов конструкций; 12 - заполнение бланков для динамического расчета; 13 - динамический расчет; 14 - анализ результатов динамического расчета; 15 - оформление общего вида узла; 16 - заполнение бланков для комплексного поверочного расчета и моделирования; 17 - расчет и моделирование; 18 - анализ результатов; 19 - выдача заданий на деталировку; 20 - «перейти к другому варианту конструкции»; 21 - «есть ли еще вариант конструкции?»; 22 - «перейти к следующему варианту структуры»; 23 - «есть ли еще вариант структуры?»; 24. главный компьютер; 25 - графопостроитель; 26 - банк типовых решений; К - операция, выполняемая конструктором; «+» - удовлетворительное решение; «-» - неудовлетворительное решение
